Product Design Case Study
Bellee: a Doorbell You Wave At
A retro-style passage doorbell that rings real wind chimes when you wave your hand. An IR sensor at the door sends a 433 MHz radio signal to a servo unit inside, which strikes the chimes. The sound is analog, the trigger is contactless, and there is no button anywhere.
The Goal
Our brief: design a retro-style passage doorbell that produces a pleasant, pet-friendly sound to alert residents of human presence, while adding modern features for versatility and accessibility.
Before designing anything we wrote objectives with numbers attached. Detection accuracy of 95% or better. Response time under half a second. Power consumption under 2.5 W. A setup that a first-time user could finish in 15 minutes without help.
System Design
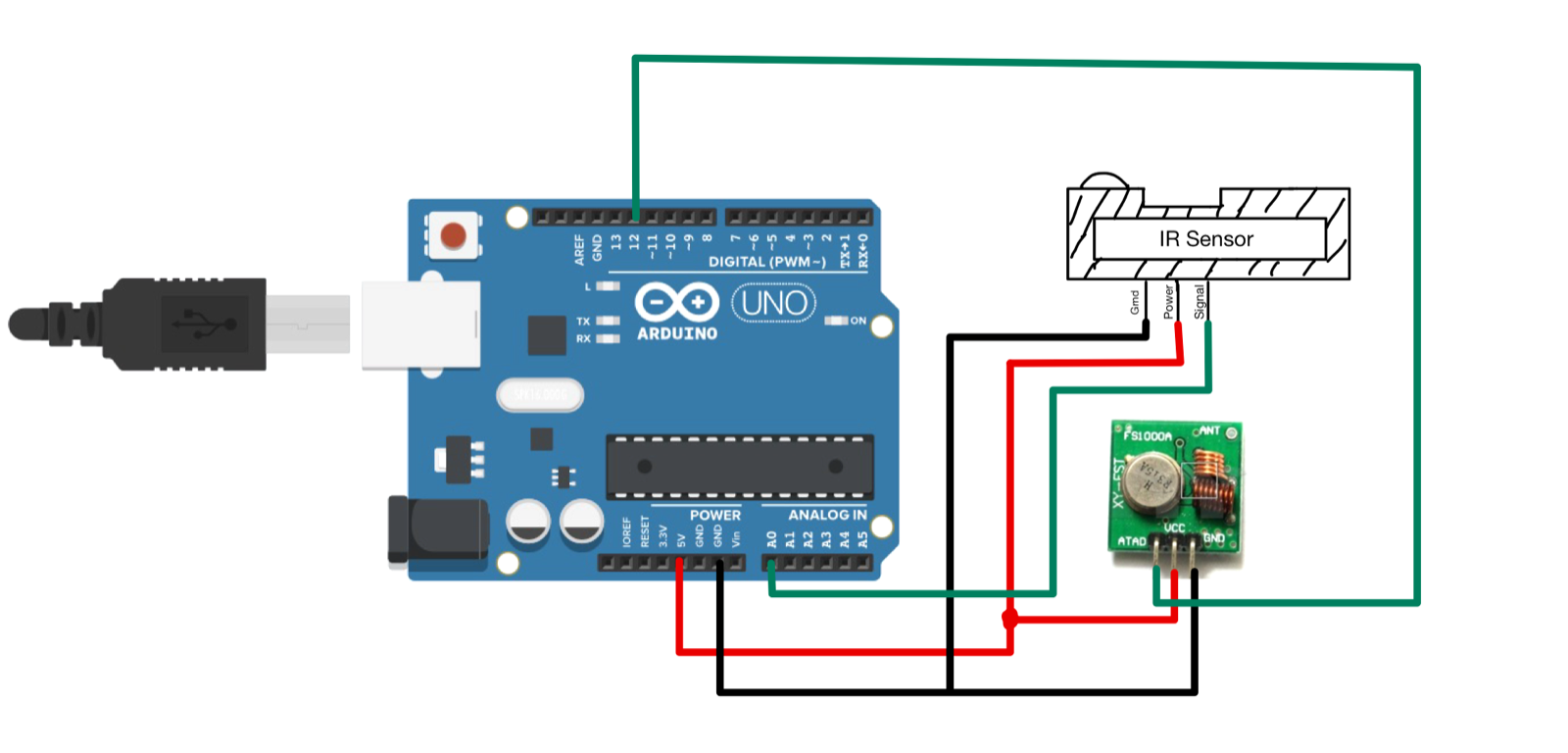
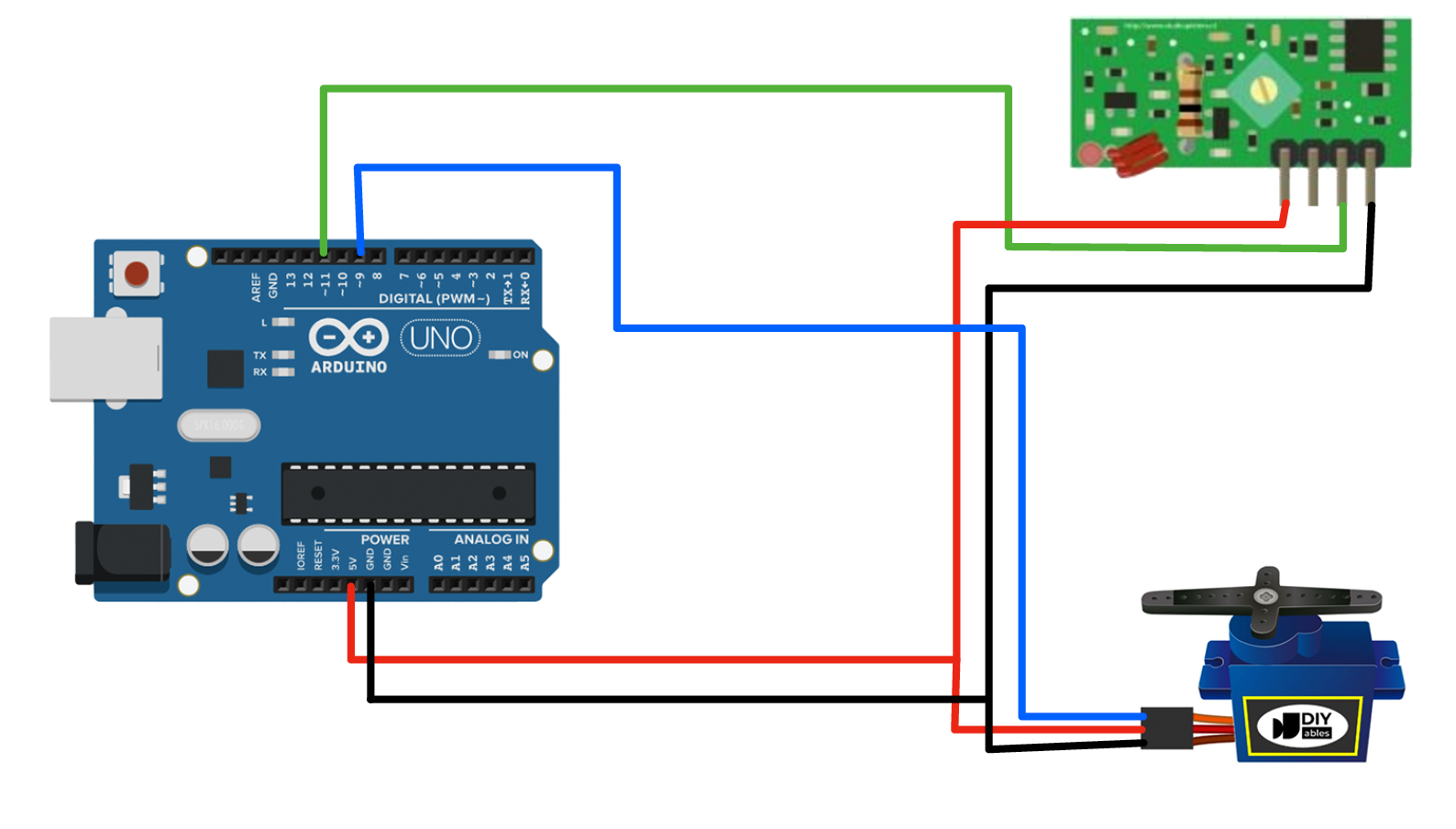
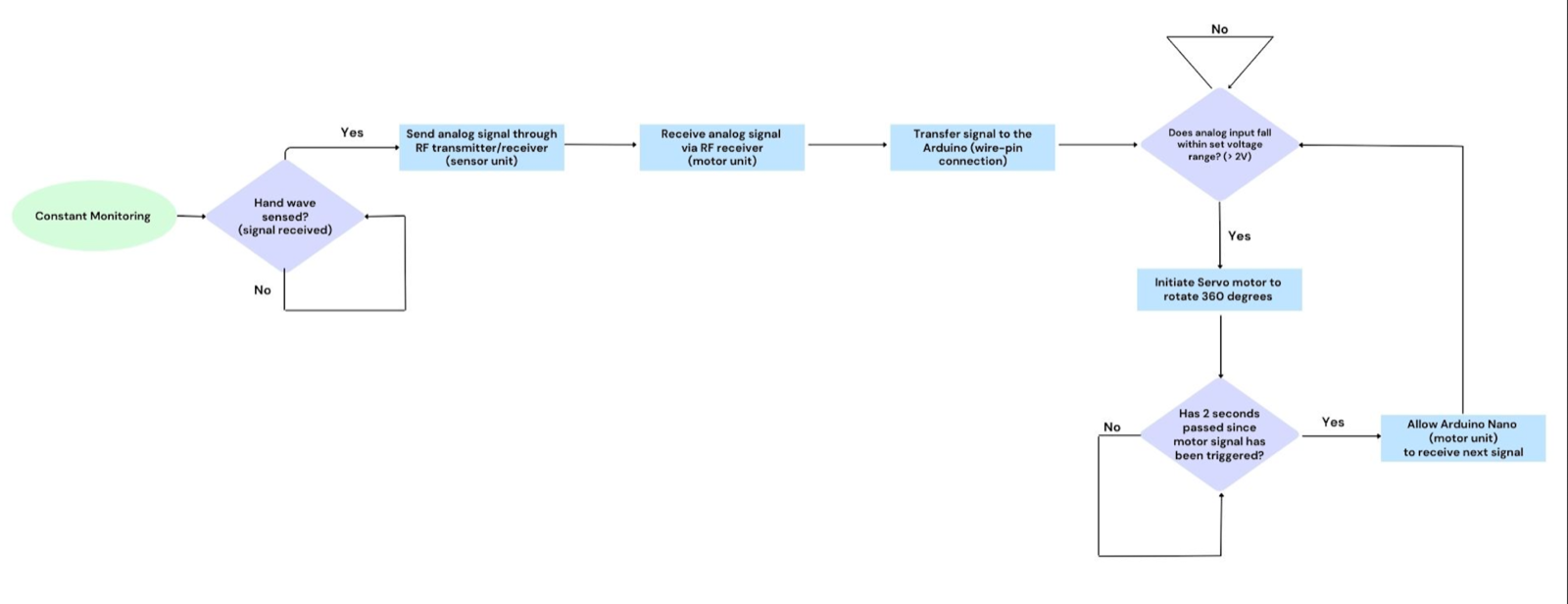
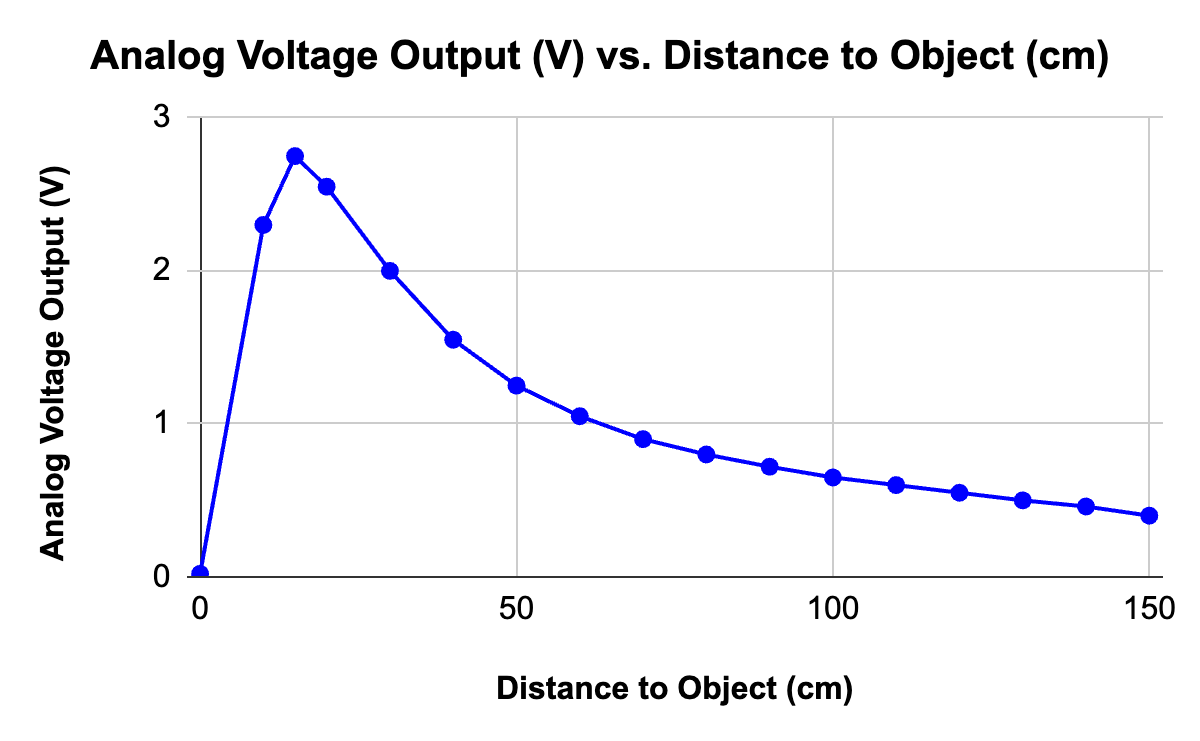
The product is two modules. A sensor unit mounts at the entryway, where an IR distance sensor watches for a hand wave within about 10 cm and transmits over a 433 MHz RF link. A motor unit lives inside the home, where an Arduino receives the signal and drives a servo that strikes real wind chimes. After each ring the code ignores new gestures for a short lockout so the chimes can ring out naturally instead of stuttering.
We also prototyped a two-Arduino WiFi version and compared the two head to head. The RF pair won because it was simpler to implement, more reliable with standard protocols, and it let us run the whole system from a single Arduino.
My Part: the Housings
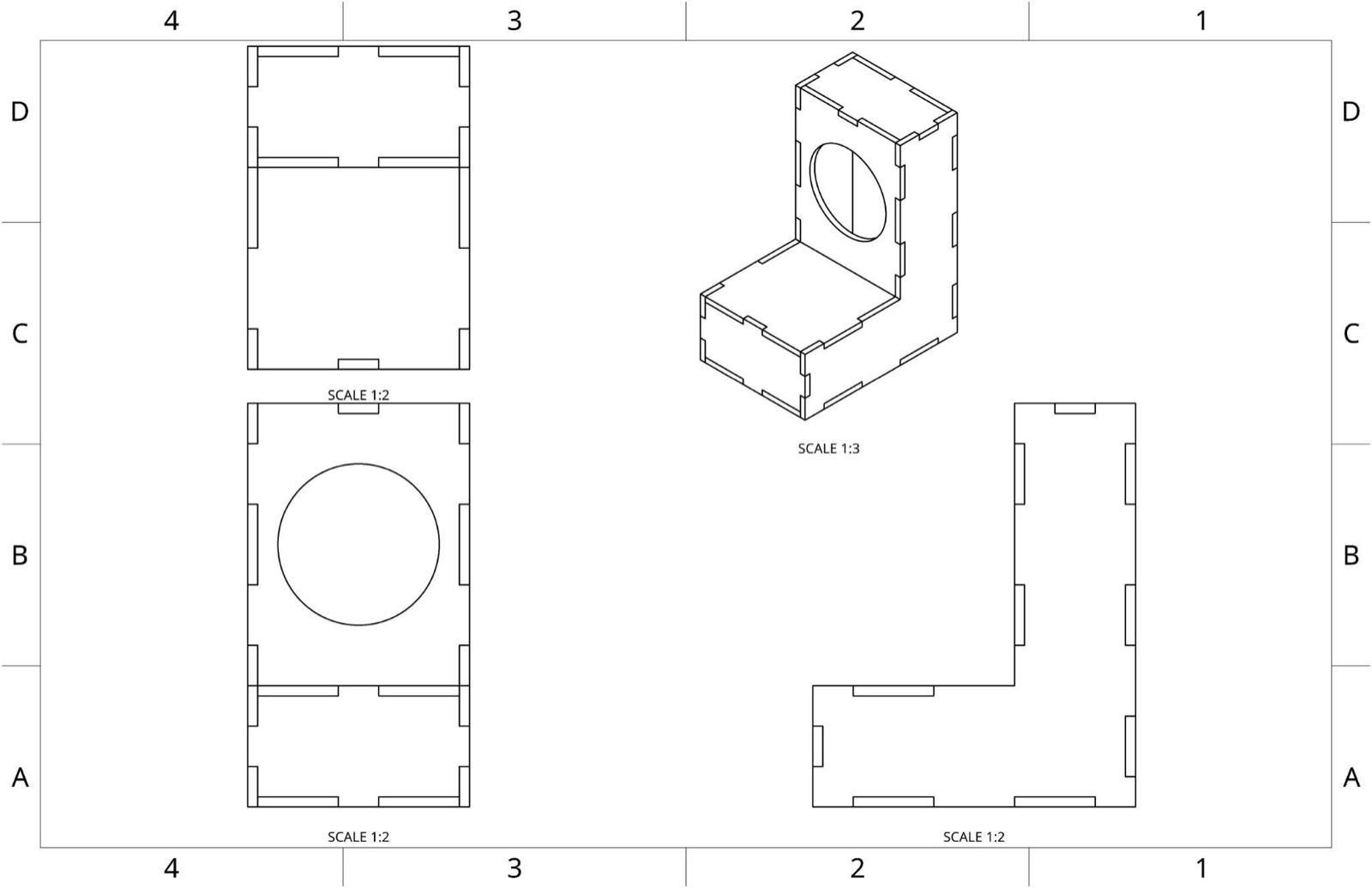
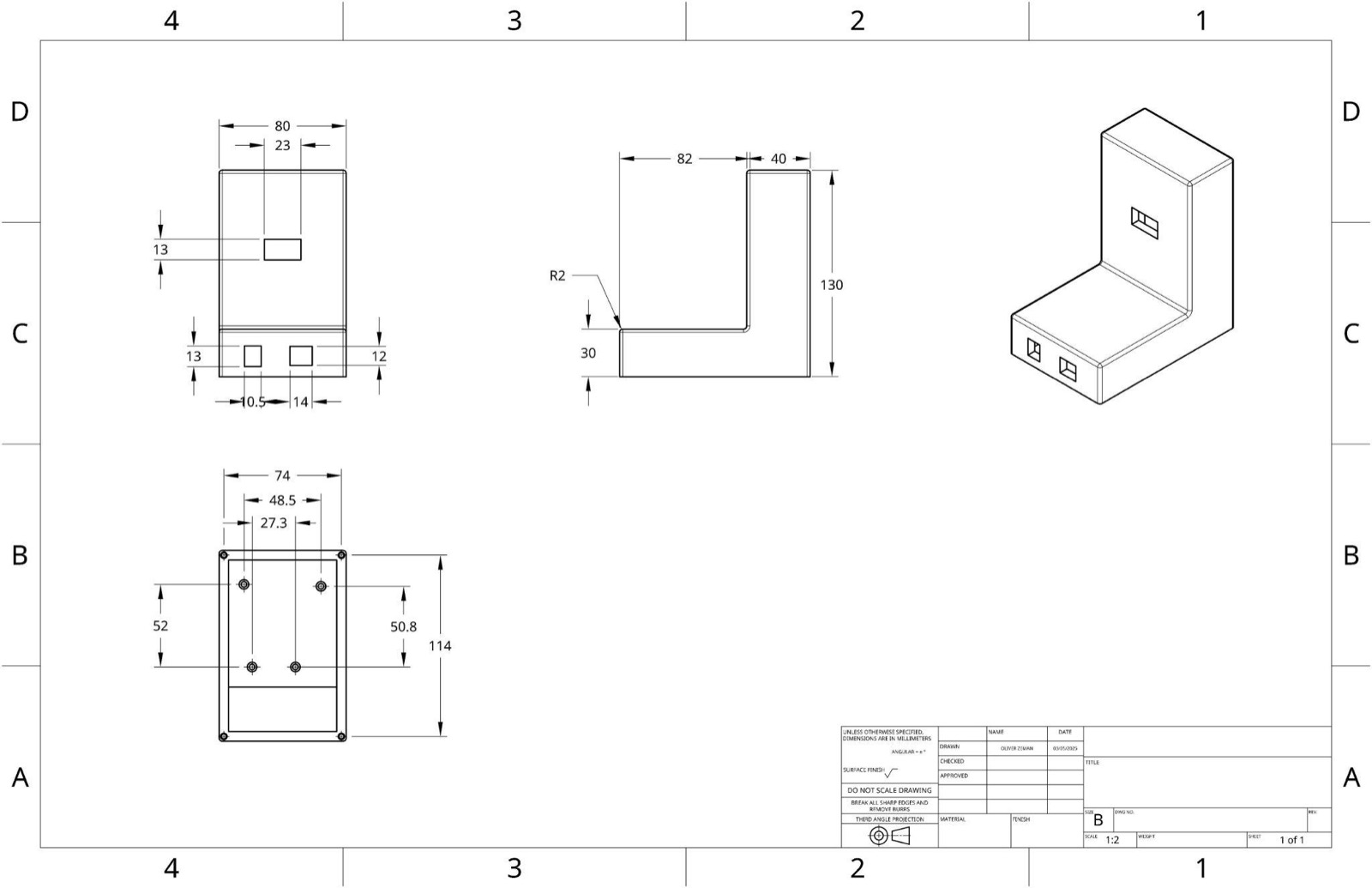
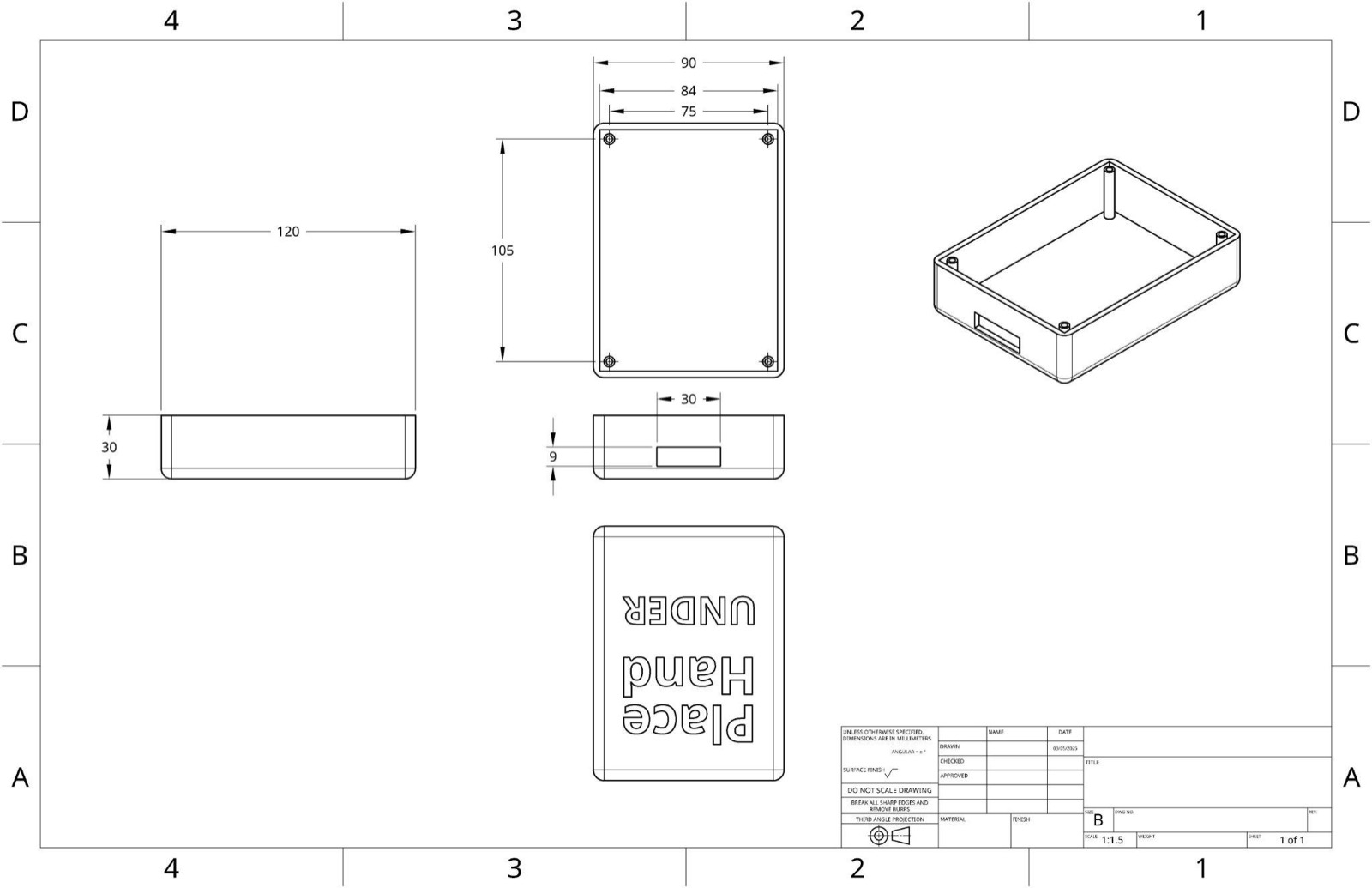
I modeled the enclosures for both units. The motor housing holds the Arduino on stand-offs so that powering it doesn't stress the pins underneath, gives the servo a mounting point above the chimes, and has a removable backplate for battery access. The sensor housing has a downward cutout (you wave under it) and room for the board, the sensor, and a 4×AA battery pack.
The early concept assumed 3D-printed shells, and my first drawings were made for printing. As the design matured we switched to finger-jointed walnut plywood, which fit the retro look far better and gave the chimes a warmer mounting surface than plastic would have.
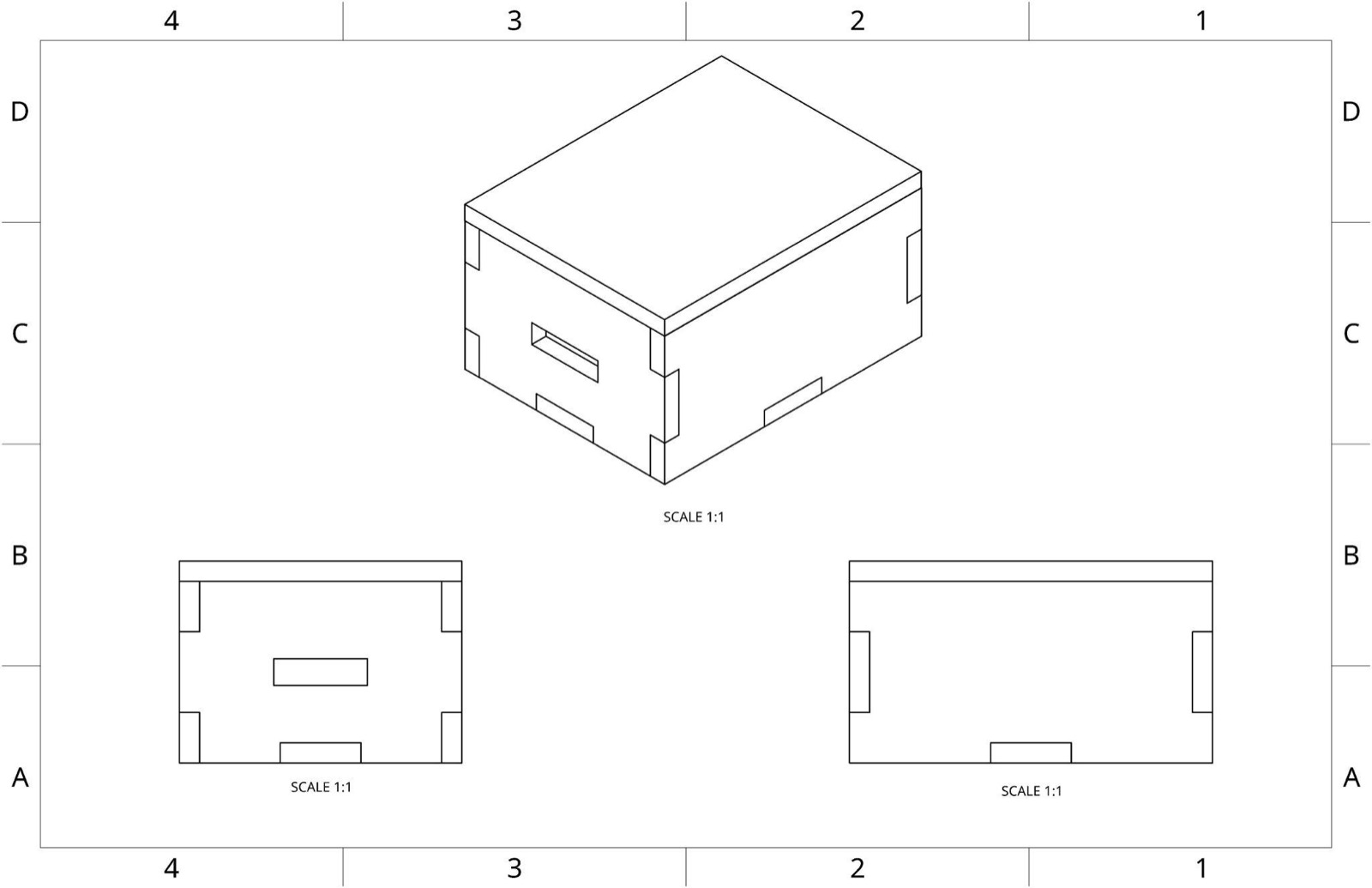
The Build
Wind chimes strung by hand, plywood boxes cut and joined, and the electronics moved in one module at a time.
Testing & Iteration
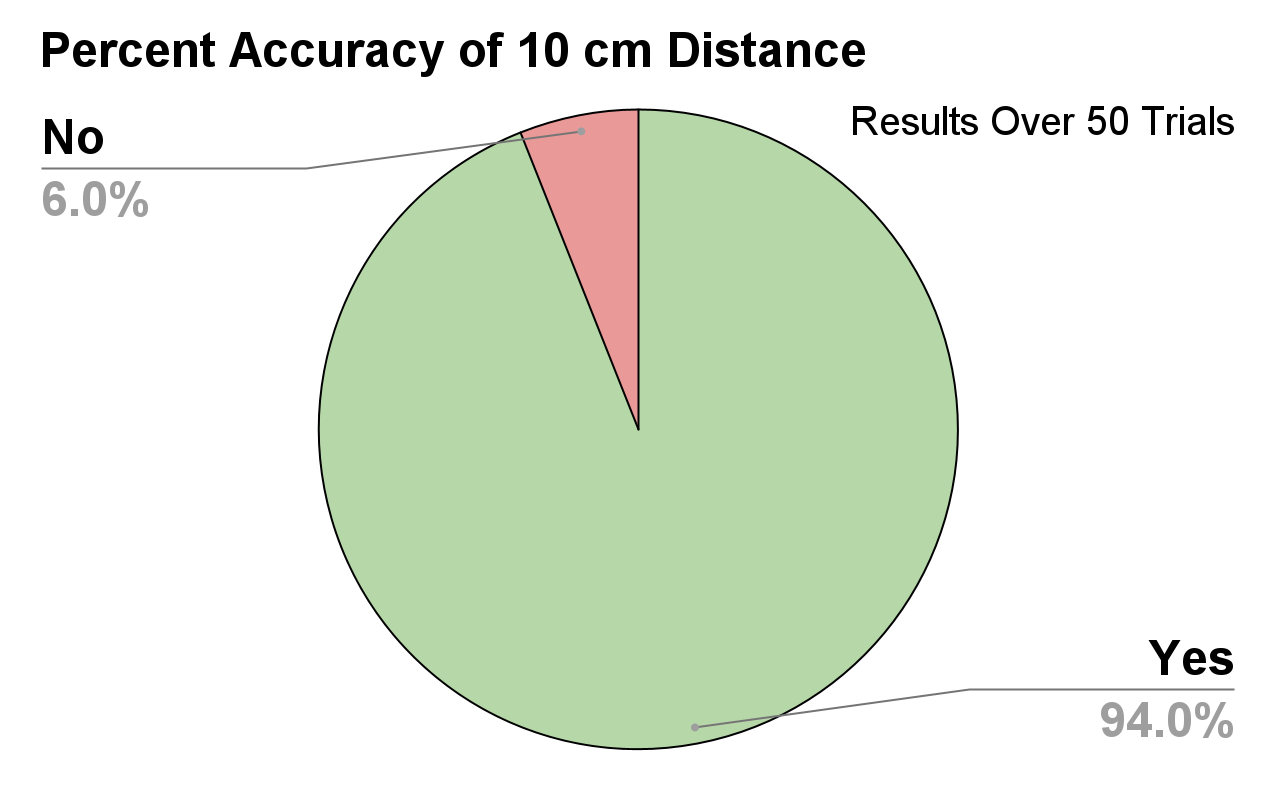
The first prototype detected a 10 cm hand wave 76% of the time. That means one visitor in four goes unnoticed, which nobody would accept from a doorbell. Reworking the sensor placement and detection threshold brought accuracy to 94% over 50 trials, just short of our 95% objective and a number we measured rather than estimated.
RF range testing brought the best surprise. Adding a simple antenna pushed reliable communication well past what the datasheet suggested, to a measured maximum of 8.34 m across five trials. A power budget put the whole system under 1 W. Battery life for the sensor unit came out to roughly 3 hours, which is the weakest part of the design and the first thing I would fix.
What I Learned
- Enclosure design is product design. Stand-offs, backplates, and battery access decide whether hardware is pleasant to live with, not just whether it works.
- Prototyping two architectures (WiFi and RF) cost us a few days and saved us weeks. The simpler system won on reliability.
- A number you measured beats a number you hoped for. Running 50 trials told us exactly what to fix next.
- Next time I would test the chime sound with real users. We validated the engineering and assumed the aesthetics.